CanSatは惑星探査を目的としたロボットです。機体には環境の情報を読み取るセンサが多数実装されており、基地局に環境のデータを送信しながら要求されるミッションを遂行します。機体のサイズはφ146mm×240mm以内、重量は1050g以内(能代宇宙イベントレギュレーション参照)に決められています。
機体は大会に合わせてランバック、フライバック、ミッションの3つのカテゴリーに分類されます。それぞれの部門は、機体を気球やドローンで上空に運んだ状態から投下し開始となります。ランバックは機体に取り連れられたパラシュートで降下し、着地後にパラシュートを分離し、予め決められた座標の目的地に自律して向かいます。フライバックの場合は投下後に機体の翼を制御して目的地に向かいます。ミッションは各班ごとに定めた目的を達成します。例えば「地中の水分測定」「降下中の機体の姿勢制御」「地形マッピング」「サンプルリターン」などが設定されるミッションです。
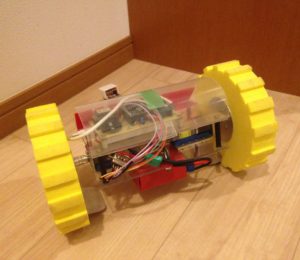
ランバックの場合写真のような二輪型が主流ですが、レギュレーション内であれば、複数車輪でも、車輪でなく足による歩行でも良く、全出場チームが唯一無二の機体設計を行います。大会では制御の精度、機体のオリジナリティ、社会貢献度等が評価されます。